Welcome to our online map viewer! Here you will find interacting maps of
pervious scans performed by Beam as well as some of our open source datasets.
Platforms
We have four scanning platforms:
4. Inspector Gadget Handle (IG Handle) : IG Handle is designed to be both a mobile
hand scanning platform as well as capable of mounting onto a ground robot for autonomous scanning.
todo: ad all sensors here
We have released data collected from the IG Handle
1. Inspector Gadget (IG) : IG is more focused on inspection. For localization,
IG relies on a horizontal VLP16 lidar, IMU, and Fisheye SLAM camera. For mapping and inspection,
IG uses the upper sensor system which includes a vertical VLP16 lidar, one high resolution camera
for detecting defects, one fisheye camera for map colourization, and one infrared camera for
detecting subsurface defects or any temperature gradients.
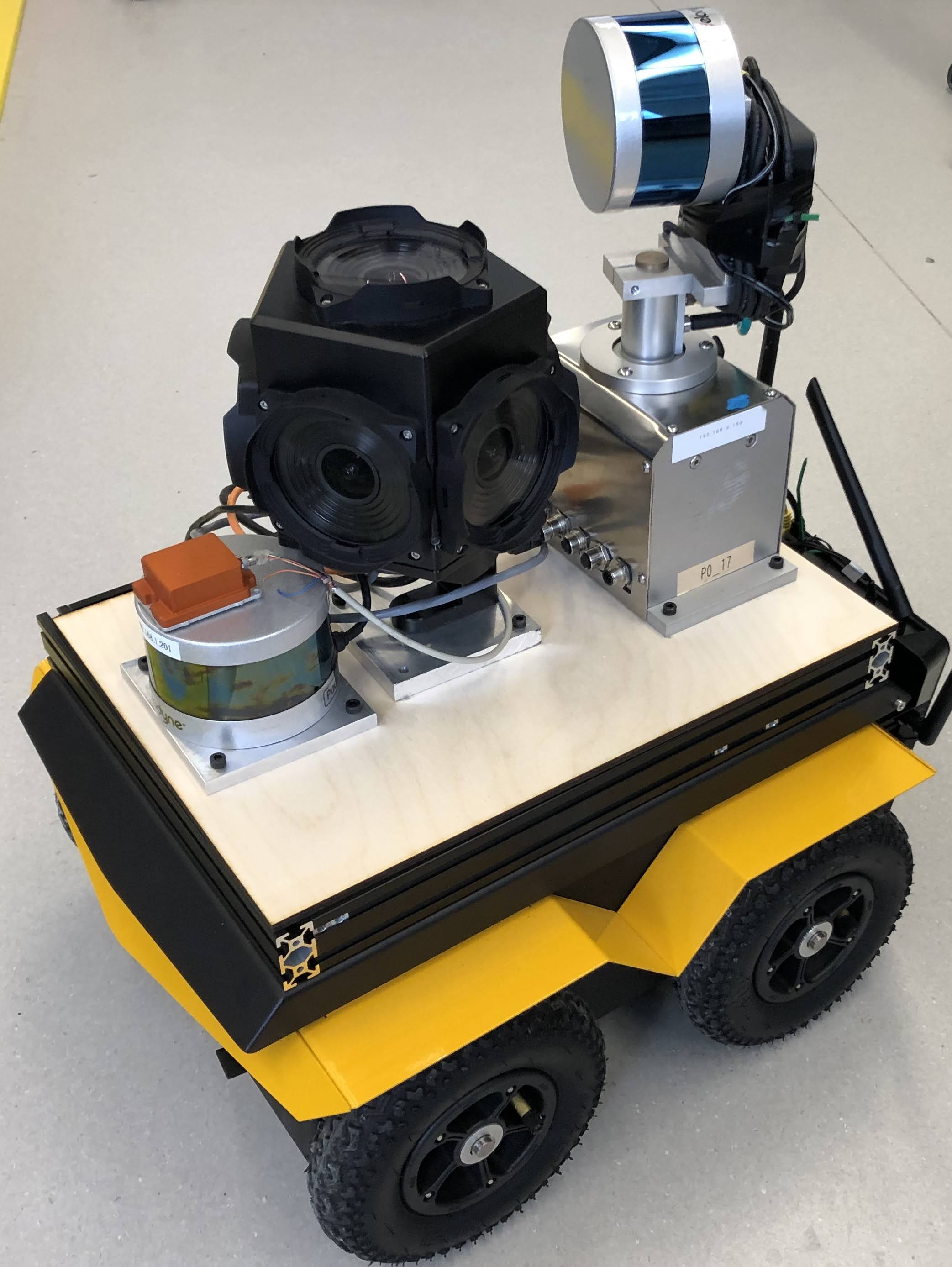
2. Robot Eng (RobEn) : RobEn is more focused on rapid mapping and full coverage.
For localization, RobEn has a horizontal VLP16 lidar, IMU, and Ladybug5+ spherical camera. For
mapping, RobEn uses a vertically mounted rotating VLP16 which gets full 360 degree coverage once
every second, and the spherical Ladybug5+ camera which gets full coverage at a high rate.
3. Faro Focus : We also have access to a more
traditional tripod based laser scanner
(often referred to as Terrestrial Laser Scanners). This is the current
go-to solution for most land-based laser scanning. These scans are very time
consuming and manual data-processing is required after collecting the
scans to generate the final maps.
Map Results
IG Maps
RobEn Maps
Faro Maps
Mapping with the Autonomoose
We also have some maps generated using data from the University of Waterloo's
autonomous vehicle platform, the Autonomous.
This work was done in
collaboration with the Waterloo Autonomous Vehicles
(WAVE)
lab. Specifically, we lead research on filtering snowfall from Lidar scans
for autonomous vehicles.
We developped a custom de-noising filter to remove snow in real-time without
removing important environmental features. This work was published and presented
at the Computer and Robot Vision (CRV) conference in 2018 (see
paper).